-
2 h.
-
 Serbian
Serbian
How to Build Your First Robot - series
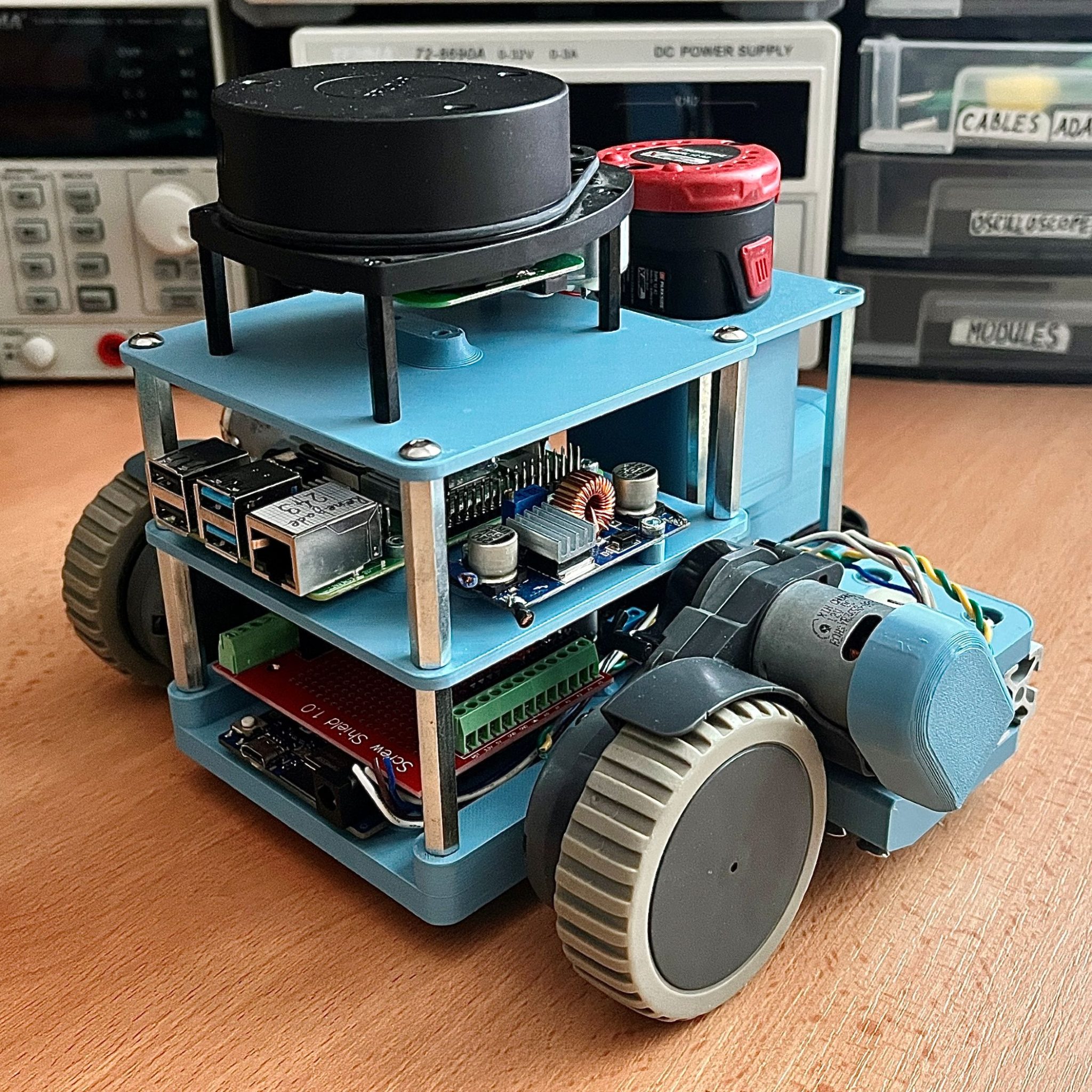
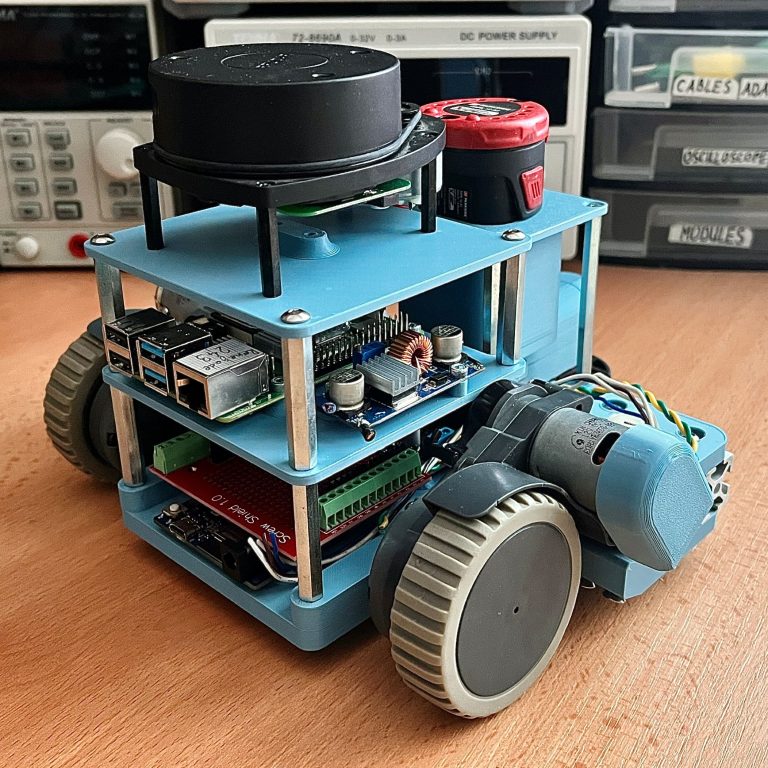
Through a series of four workshops, Miloš Rašić, a master electrical engineer specializing in robotics and biotechnology, will guide you from an idea to a functional robot that you can control using a laptop, joystick, or ROS system.
The series is designed for anyone stepping into the world of robotics for the first time.
About This Workshop
Discover the World of Robotics First-Hand
Have you ever imagined controlling a robot but never had the chance to build one? This four-workshop series guides you through the entire process — from the initial idea to a small functional robot that can be controlled using a laptop, joystick, or ROS system. The workshops are designed for students who are new to the world of robotics.
From Theory to Hands-On Practice
Forget dry diagrams and textbook theory — here you will design, assemble, and program your own robot. Each workshop combines theoretical foundations with practical exercises, including electronics, mechanics, CAD modeling, 3D printing, and programming. By the end of the series, every participant will have a functional robot ready for control and experimentation.
Why Join?
This is your chance to dive into robotics through hands-on work and experiments, develop your technical skills, and ultimately build a robot that works and responds to your commands. Join us and create your first robot!
Workshop 1 – Concepts and Introduction (October 24)
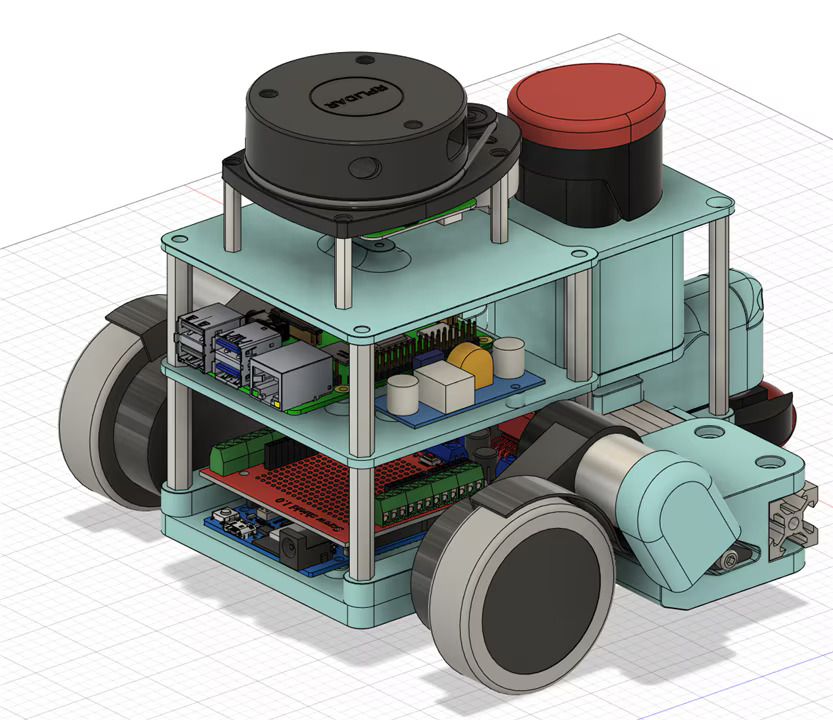
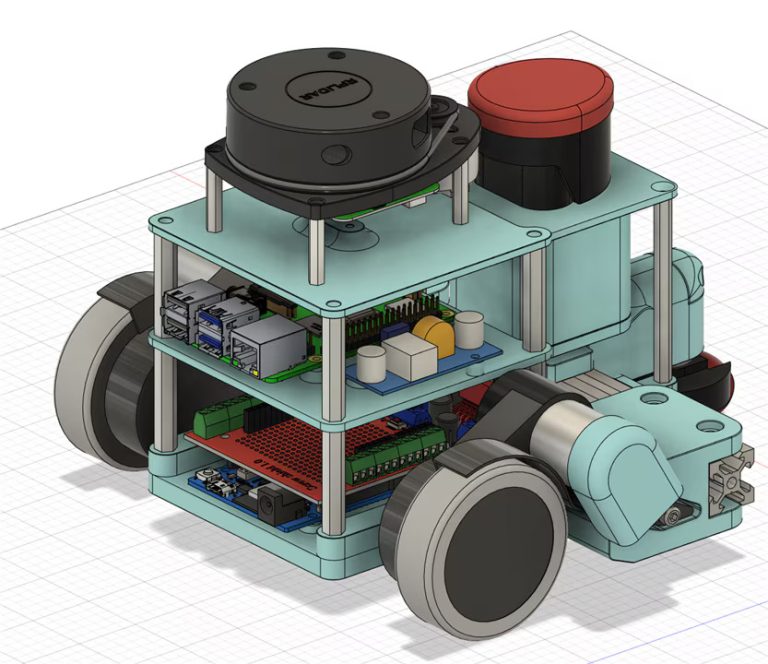
Get familiar with the basics of robotics, microcontrollers (Arduino, Raspberry Pi), and electronics for robots. Learn how sensors and actuators work, and how to prepare a 3D model for printing. Everything is demonstrated through practical examples and simple experiments.
Covered topics: Basics of Robotics, Basics of Electronics, CAD & 3D Printing
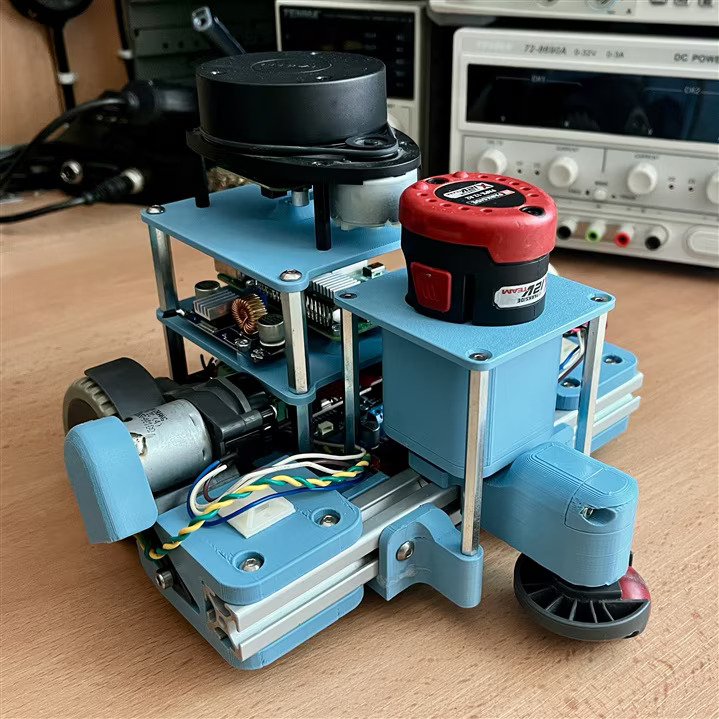
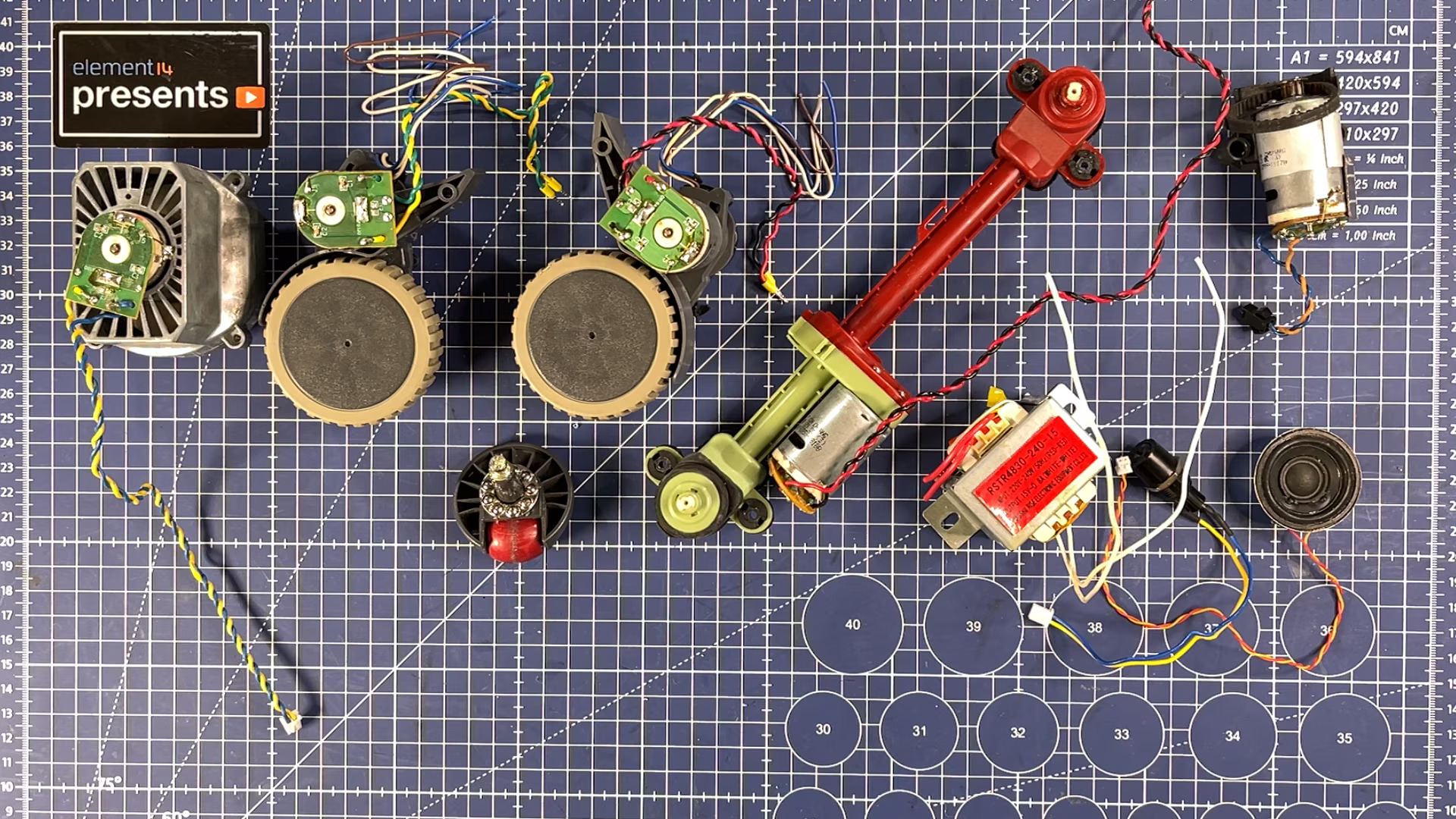
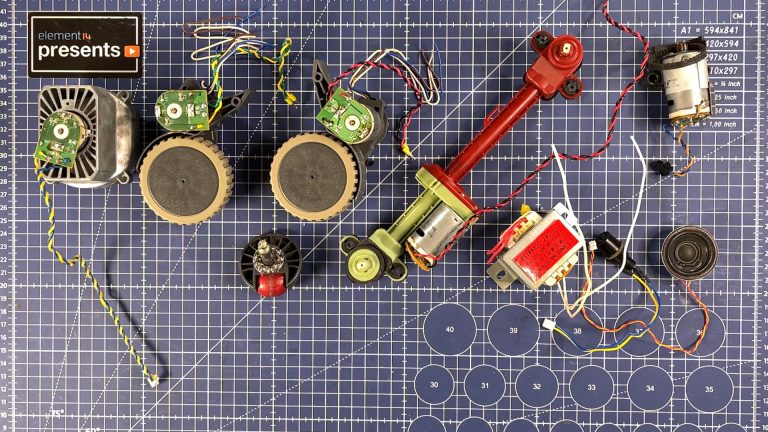
Workshop 2 – Assembling the Robot (October 29)
Learn how to build a robot step by step. You will disassemble an actuator, study gears and encoders, connect electronics and 3D components, and finally assemble hardware ready for programming.
Covered topics: Mechanics, Electronics, CAD & 3D Printing
Workshop 3 – Robot Control and Operation (October 30)
Focus on software and control: program the microcontroller and laptop so that the robot can move using a joystick. Learn about PID controllers and how to stabilize wheel speed and position.
Covered topics: Python, C++, PID Controllers, Basic Robotics Calculations
Workshop 4 – Robot Operating System (November 5)
Discover the core concepts of ROS2, creating nodes, topics, and services. Test the robot with sensors and implement autonomous functionalities such as stopping before obstacles.
Covered topics: ROS2, Electronics – Sensors, Python – ROS2
Have a question?
Contact UsAvailable Resources
More Events For You
 The Power of Imagination: How Creativity Shapes the Brain
The Power of Imagination: How Creativity Shapes the Brain
Discover why the brain imagines, how creativity shapes learning and behavior, and how to develop critical and creative thinking through science-based exercises.
 3D Print Spring 1/2: From Pixel to Flower
3D Print Spring 1/2: From Pixel to Flower
Introductory 3D printing workshop for complete beginners. You’ll design a personalized flower token that will become part of a spring vase in the second workshop.
 3D Print Spring 2/2: Make Your Own Flower Vase
3D Print Spring 2/2: Make Your Own Flower Vase
Second session of the two-part 3D printing workshop for beginners. Your flower token from day one becomes part of a spring vase — you’ll finalize the complete project and learn more advanced 3D design principles.
 Inside a Blood Pressure Monitor: From Cuff to Algorithm
Inside a Blood Pressure Monitor: From Cuff to Algorithm
Look inside a blood pressure monitor — from the cuff and sensors to the algorithms that turn signals into the numbers you see on the screen.
 The Inner World of Other People: How Well Do We Truly Understand?
The Inner World of Other People: How Well Do We Truly Understand?
Regardless of our psychological background, each of us tries to understand the people around us. In this workshop, we explore our capacity for mentalization — the ability to understand the feelings, intentions, and perspectives of others.
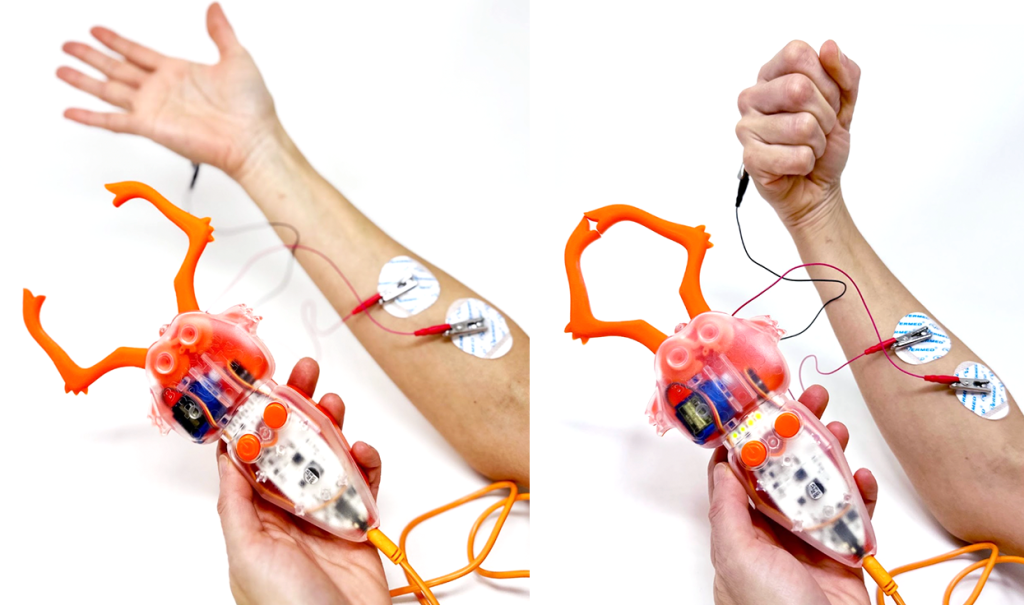 You Are the Controller: Brain-Machine Interface Workshop
You Are the Controller: Brain-Machine Interface Workshop
Control a robotic claw using electrical impulses from your own muscles. Through hands-on experiments with Backyard Brains Spiker:bit and The Claw, discover how brain-machine interfaces really work.